本篇文章介绍了在TC397平台使用EB-tresos对CAN驱动模块进行配置的实战过程,不仅介绍了标准CAN的发送与接收,还介绍了CANFD的实现与调试以及扩展帧的使用。M_CAN是德国博世公司开发的IP,因为英飞凌的芯片完整的集成了这个IP,所以整体的配置都比较符合通用的芯片配置使用规范,如果读者有在其他平台实现CAN通信的经验,应该很容易就能上手本篇文章描述的配置实现过程。
目录
概述
环境与目标
EB-tresos配置
Port配置
CAN配置
CanGeneral
CanController
CanControllerBaudrateConfig
CanControllerFdBaudrateConfig(CANFD配置)
CanHardwareObject
CanHwFilter
IRQ配置
MCU配置
ResourceM配置
CAN驱动调试
标准CAN测试代码与结果
CANFD测试代码与结果
扩展帧测试代码与结果
概述
英飞凌公司AURIX™ TC397芯片内部集成了三路MCMCAN(CAN0,CAN1,CAN2),每路CAN支持4个node,MCMCAN使用了Bosch公司M_CAN的IP,其具有以下的功能特点。
- 可配置的消息RAM,用于存储要发送或接收的消息。
- 基于定时器的CAN帧传输和接收CAN帧的超时。
- 通过中断压缩单元分组和发送中断信号。
- 通过BPI访问保护。
英飞凌提供的CAN驱动程序负责提供符合AUTOSAR 4.2.2/4.4.0指定标准的CAN通信服务。M_CAN单元是底层CAN硬件单元,它由包含多个共享消息RAM(在AUTOSAR中称为硬件对象)的节点组成(在AUTOSAR中成为控制器)。CAN驱动程序提供服务为:
- 初始化CAN控制器以控制CAN控制器的行为和状态。
- 设置和修改CAN控制器的波特率配置。
- 支持CAN和CANFD帧传输和接收。
- 支持在轮询和中断模式下,帧成功传输通知以及专用FIFO消息的接收和总线其他事件通知。
- 数据接收使用接收FIFO作为缓存。
- Pretended网络模式处理。
- 支持多次读/写周期功能。
- 使用Tx队列进行多路传输。
每个CAN节点针对下列事件提供单独的中断线进行处理:
- Bus-off事件。
- 发送事件。
- 专用消息接收事件处理。
- FIFO0/1的溢出报警以及FIFO全事件处理。
- 针对发送与接收的混合模式处理。
CAN驱动程序作为Post-Build的变体(未明确定义)来提供使用。因此,驱动程序支持带有预编译和符合Post-Build(构建后)配置结构体的配置参数。CAN驱动程序提供的API是具有防重入等多核特性,这意味着可以同时从多个核心调用使用它们。
下图为CAN驱动涉及的软硬件接口图(HSI):
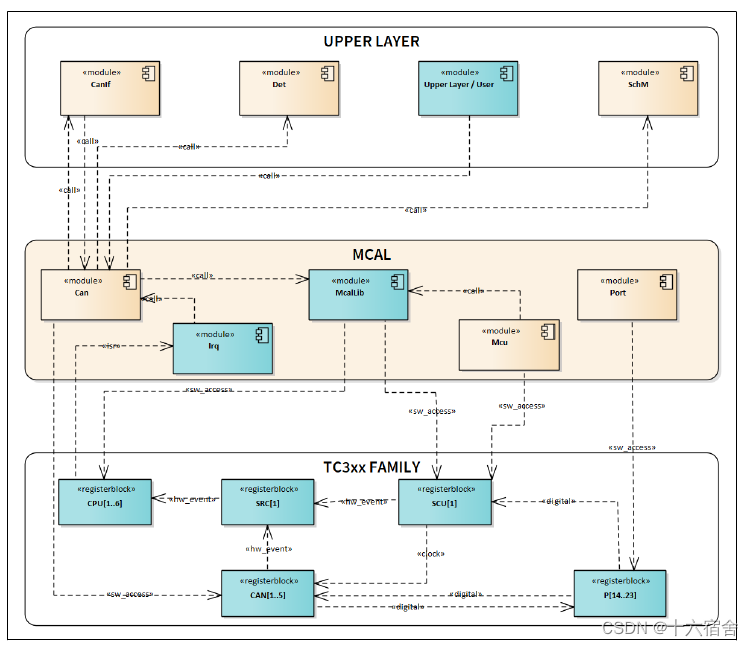
英飞凌提供的CAN驱动程序使用使用M_CAN并遵守ISO 11898-1进行通信。此外,M_CAN还支持符合CANFD协议规范1.0的通信。驱动程序涉及的硬件特性如下:
- M_CAN的IP中所有的CAN控制器以及消息RAM硬件资源都被用于实现CAN驱动程序。
- CANFD最多支持64个字节的数据。
- 多达64个专用的接收缓冲区。
- 多达32个专用的发送缓冲区。
- 两个可配置的接收FIFO。
- 可配置的发送队列。
- 每个控制器可以配置四个单独的中断,分别为Rx,Rx FIFOs,Tx,bus-off。
不支持的M_CAN特性如下:
- 事件同步时间触发通信。
- CAN错误记录。
- 消息优先级。
CAN驱动程序使用M_CAN IP核中的以下的硬件事件:
- CAN /CANFD帧的成功传输由标志(IR寄存器中的相关位)与中断通知。CAN驱动程序使用 FIFO新条目的TxEvent来处理对上层的通知。
- 成功接收到CAN /CANFD帧将通过标志(IR寄存器中的相关位)和中断通知。CAN驱动程序使用接收中断通知上层。
- 总线断开事件由标志(IR寄存器中的相关位)和中断通知。CAN驱动程序接收中断通知并通知上层。
- Rx FIFO0溢出报警、RxFIFOO Full、RxFIFO1溢出报警、RxFIFO1 Full事件都路由到同一个ISR。通过FIFO处理接收到的数据,所有列出的标志都在CAN驱动程序中经过处理。
环境与目标
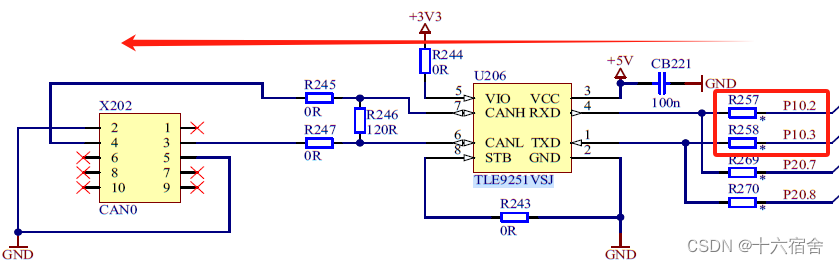
本文使用的为英飞凌提供的开发板KIT_A2G_TC397XA_TFT,收发器采用TLE9251V(CAN FDcapable),板卡上选焊的是P10.2与P10.3与TC387相连。
涉及的软件如下。
- EB-tresos:用于生成动态代码,具体工程搭建参考《【AUTOSAR MCAL】MCAL基础与EB tresos工程新建》。
- HighTech:用于编译生成elf文件,具体的工程搭建参考《【MCAL】HighTec集成TC3xx对应MCAL的Demo》。
- UDE 5.2:用于下载和调试程序。
涉及的参考文档如下表。
| 序号 | 参考资料 | 内容 |
| 1 | 《Infineon-AURIX_TC39x-UserManual-v02_00-EN》 | 英飞凌TC39x用户手册 |
| 2 | 《ApplicationKitManual-TC3X7-ADAS-V21.pdf》 | 开发板KIT_A2G_TC397XA_TFT说明 |
| 3 | 《MC-ISAR_TC3xx_UM_Can_17_McmCan.pdf》 | 英飞凌提供的TC3xx芯片CAN用户手册 |
配置目标如下:
- 正常收发标准CAN报文。
- 正常收发CANFD报文。
- 正常收发扩展帧报文。
EB-tresos配置
MCAL的配置主要涉及以下四个部分。
- Port配置:根据连接的TC397引脚,配置相应的CAN收发引脚复用功能。
- MCU配置:配置CAN时钟。
- CAN配置:主要完成CAN控制器相关的所有配置,控制器通用配置,波特率等。
- IRQ配置:完成中断相关配置。

Port配置
根据刚才提到开发板原理,我们使用了P10.2作为CANRX,P10.3作为CANTX。查找芯片手册,可得CAN发送需要通过RXDE来关联,CAN发送需要配置成ALT6。可以看出我们使用的是node是CAN02。

下图为P10.2的配置。

下图为P10.3的配置。

CAN配置
CanGeneral
该容器包含与每个CAN驱动单元相关的参数。主要需要关心的配置项如下。
- CanDevErrorDetection:打开或关闭默认错误跟踪程序 (Det) 检测和通知。
- CanMultiCoreErrorDetect :打开或关闭多核默认错误跟踪器 (Det) 检测和通知。
- CanMainFunctionModePeriod:该参数描述循环调用Can_MainFunction_Mode的周期。单位为秒。轮询调度才有效果,在这里不可以配置,在后面才可以配置。
- CanTimeoutDuration:指定在检测到超时之前阻塞函数的最大时间。单位为秒。

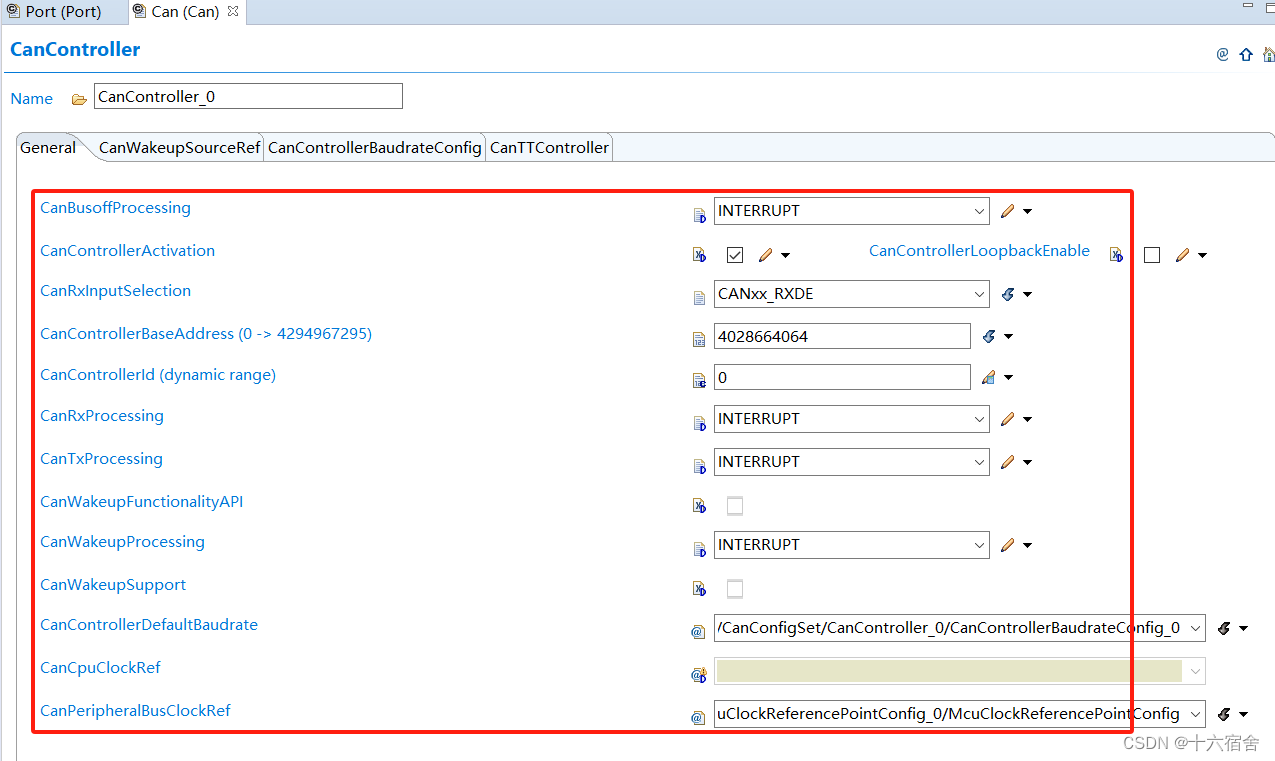
CanController
这里边重要的配置比较多,对应的是一个CAN控制器的配置。
- CanBusoffProcessing:Busoff处理用中断还是轮询的选择。
- CanControllerLoopbackEnable:指定控制器是否启用内部回环模式(发送与接收内部连接,用作测试)。
- CanRxInputSelection:接收输入线端口引脚选择,根据上面Port配置提到的P10.2对应RXDE。
- CanControllerBaseAddress:CAN控制器的基址。因为我们使用的是CAN02,则基地址查询手册可知为0xF0208900。

- CanRxProcessing:接收方式是中断还是轮询。
- CanTxProcessing:发送方式是中断还是轮询。
- CanWakeupProcessing:唤醒方式是中断还是轮询。
- CanControllerDefaultBaudrate:参考为CAN控制器配置的波特率配置的容器。
- CanPeripheralBusClockRef:参考为CPU外设总线时钟的配置,该配置在 MCU 驱动程序配置中设置。
CanControllerBaudrateConfig
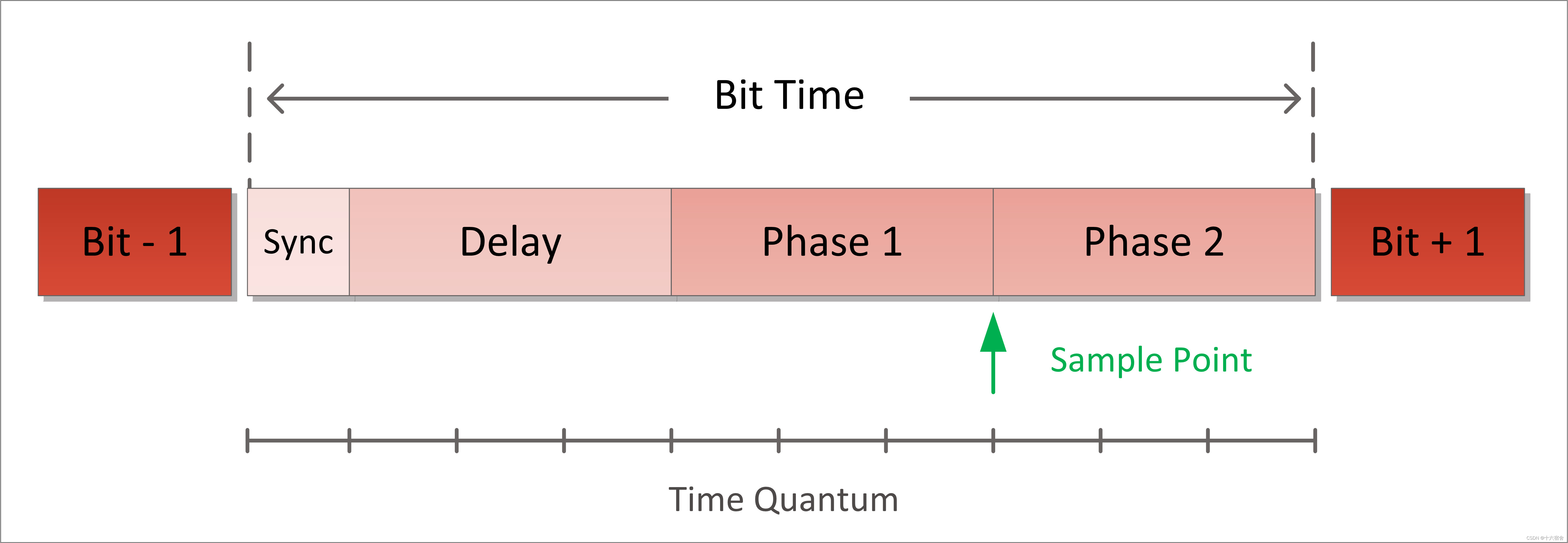
该容器包含CAN控制器的位时序相关配置参数。在介绍相关的参数前我们先介绍以下采样点的概念,如下图所示,采样点是can控制器对can线上电平单bit数据采样的时刻。
- CanControllerBaudRate :控制器的波特率,单位为Kbps。
- CanControllerPropSeg:指定以时间量子(最小时间单位)表示的传播延迟,对应上图的Delay。
- CanControllerSeg1:在时间量子中指定相位段1。
- CanControllerSeg2:在时间量子中指定相位段2。
- CanControllerSyncJumpWidth:由于再同步,相位 SEG1 可能会延长或相位 SEG2 可能会缩短。相位缓冲器段的加长或缩短量由再同步跳变宽度(SJW)给出的上限。
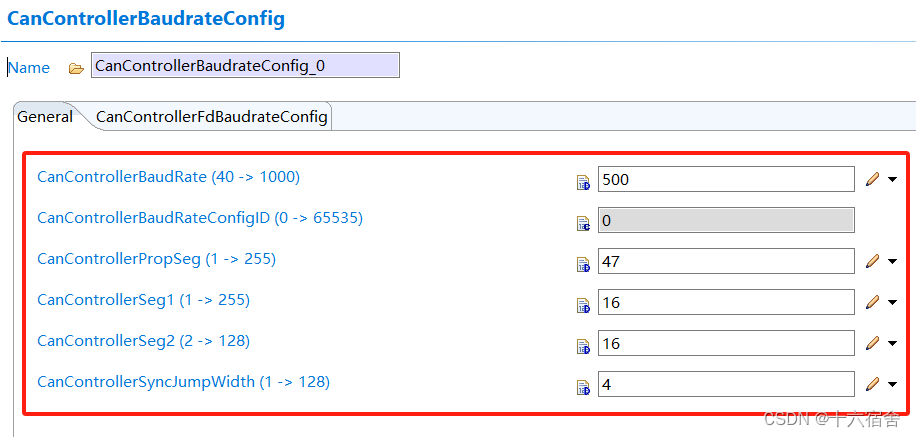
网上有很多给出CAN控制输入频率,期待CAN波特率与采样点位置( (1+SEG1) / (1+SEG1+SEG2)),即可以输出对应的参数配置,如下图所示为针对ST芯片的一个计算参数的小工具,也可以根据公式进行手算。

MCAL配置如下图。
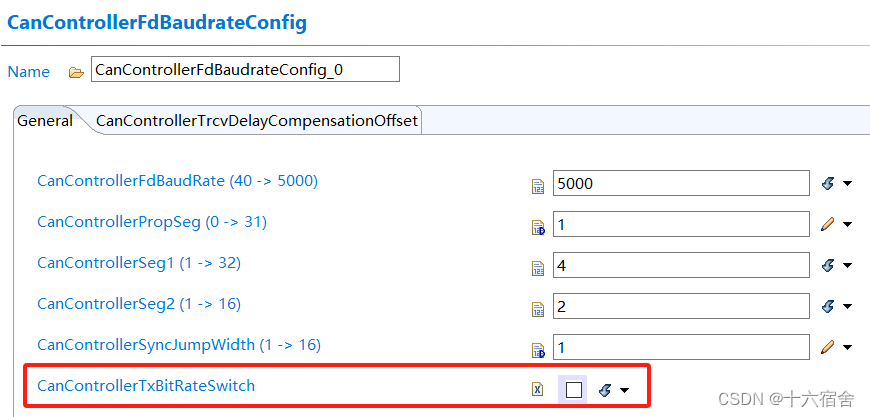
CanControllerFdBaudrateConfig(CANFD配置)
这个可选的容器包含CAN控制器CANFD帧可变速率的位时序相关配置参数,用于CANFD帧中控制场中的BRS位到ACK场之前(含CRC分界符)的传输速率。如果该容器存在,则控制器支持CANFD帧。需要关注的配置如下。
- CanControllerTxBitRateSwitch:配置是否使用第二波特率(CANFD波特率)用于发送,这里我们取消勾选,因为我们需要在支持CANFD消息的网络中传输传统CAN 2.0消息。(例如:便于CAN的选择性唤醒。)在这些情况下,有必要支持CAN-FD消息和传统CAN消息交替传输。这问题可以通过在调用Can_17_McmCan_Write函数的时候,利用CanId参数中没有用到的高位,来使用哪种类型的帧,从而在数据帧的级别上实现交替发送。
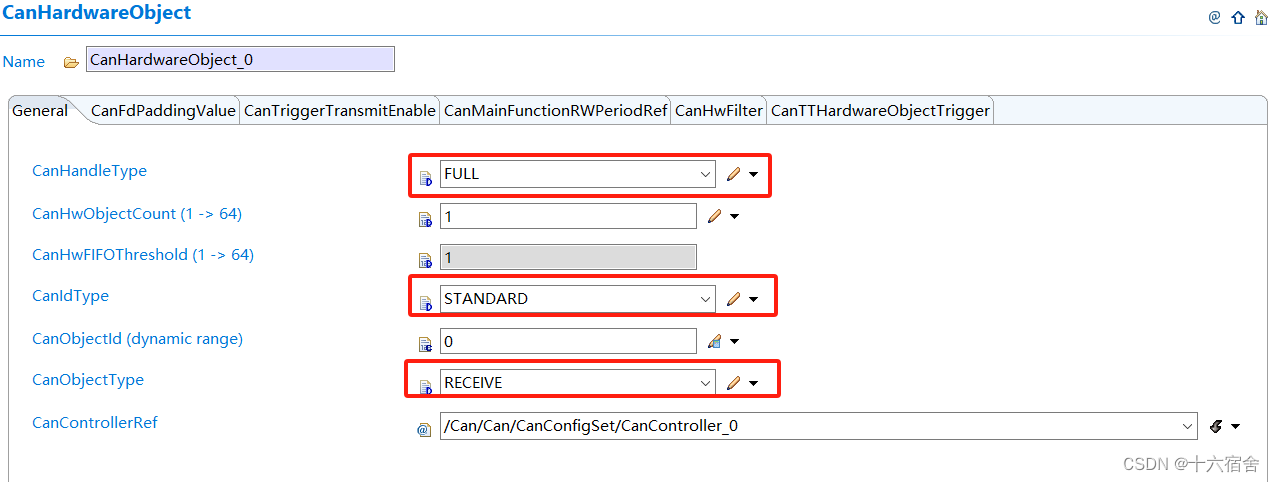
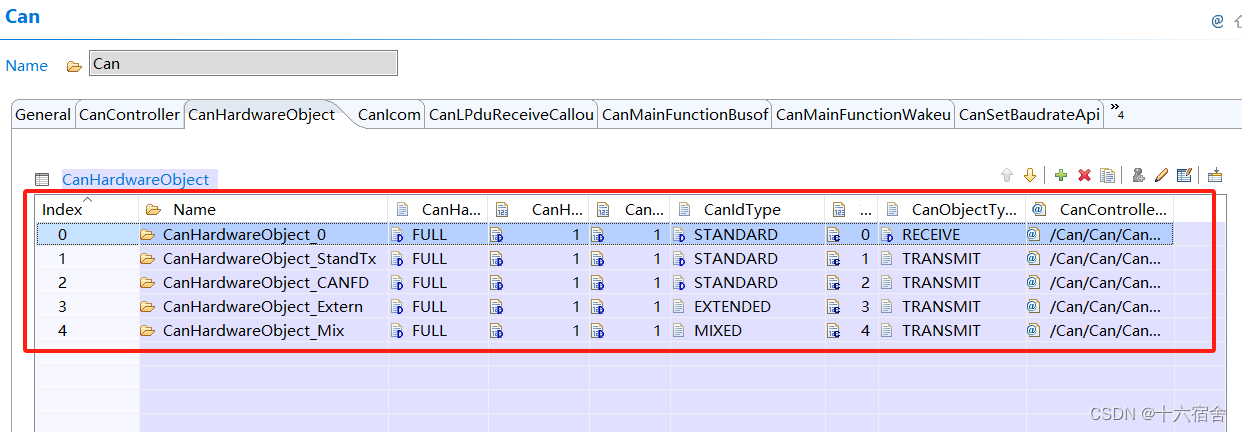
CanHardwareObject
在FullCAN架构(一个Buffer对应一个ID的报文)下,一个HWObject(Hardware Object)只能处理单个CanId,所以我们需要根据应用层接收以及发送报文数量建立相应的CanHardwareObject。
下面我们介绍一下各配置项的含义。
- CanHandleType:指定硬件对象的类型(FULL-CAN或BASIC-CAN)。由于FULL CAN特性是最常用的,所以CanHandleType配置参数的默认值设置为FULL。
- CanHwObjectCount:用于实现一个HOH的硬件对象的数量。如果是HRH,这个参数定义硬件中元素的数量。FIFO或影子缓冲区的数量,在HTH的情况下,它定义了用于多路传输或用于FullCAN HTH的硬件FIFO的硬件对象的数量。
- CanHwFIFOThreshold:指定触发中断以复制数据的Rx_FIFO缓冲区的阈值大小。
- CanIdType:指定CanHwFilterCode值是否为标准帧ID(11位),扩展帧ID(29位),还是CANID可以为标准帧或者扩展帧。
- CanObjectId:保存HRH()或HTH的句柄ID。这个参数的值在给定的CAN驱动程序中是唯一的,它应该从0开始,没有任何间隙。
- CanObjectType:邮箱类型是接收还是发送。
- CanControllerRef:HOH所关联的CAN控制器的参考。
我们需要先建立接收报文的HWObject,再建立发送的,下面是实验用到的整体配置。
CanHwFilter
这个容器只对接收的HWObject(HRH)有效,包含硬件过滤器的配置(接收ID与ID_Mask)。发送的HWObject不需要配置。

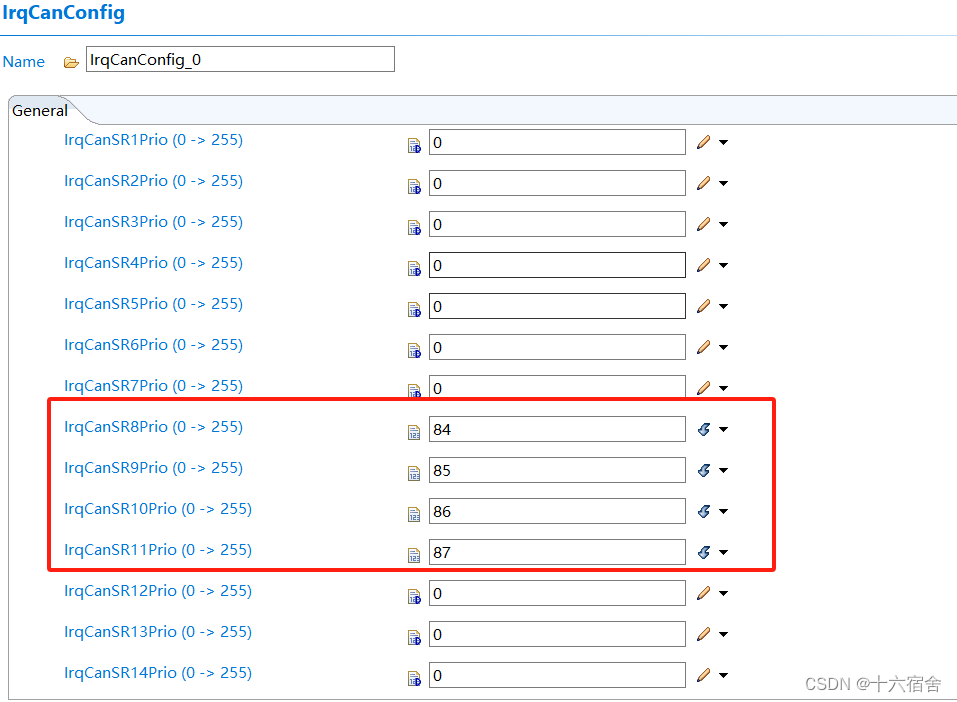
IRQ配置
每个CAN节点一组,每组四个节点。
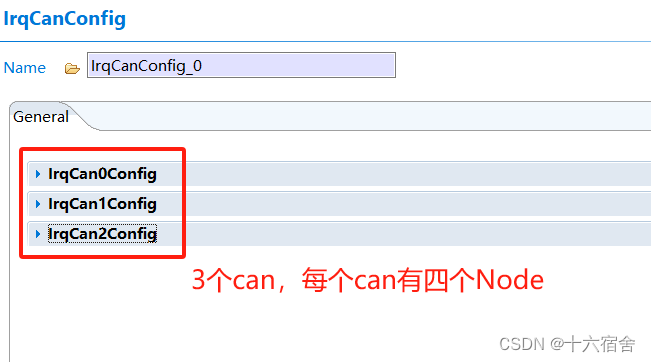
根据下图手册,找到CAN02对应的中断线。
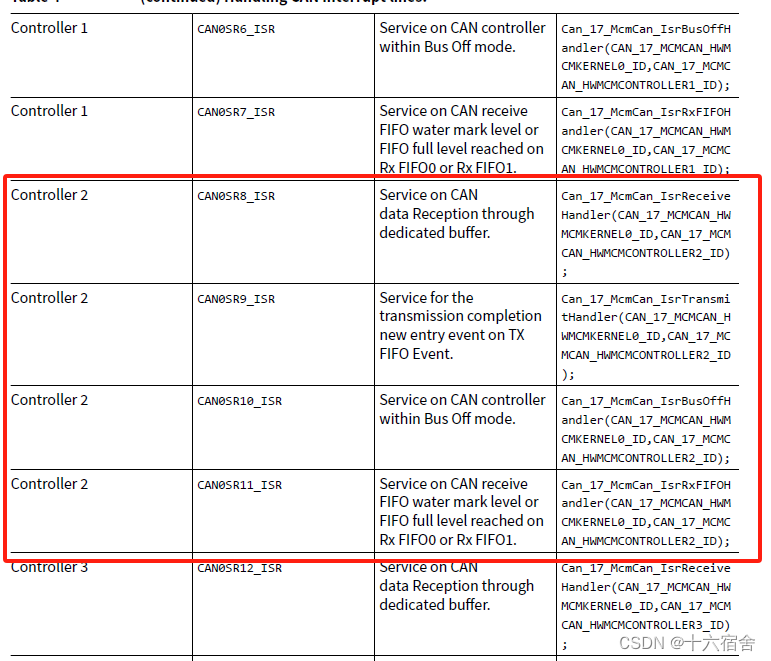
对应的中断为一类中断和服务路由到CPU0(都为默认配置,不需要修改),最终中断配置如下。
MCU配置
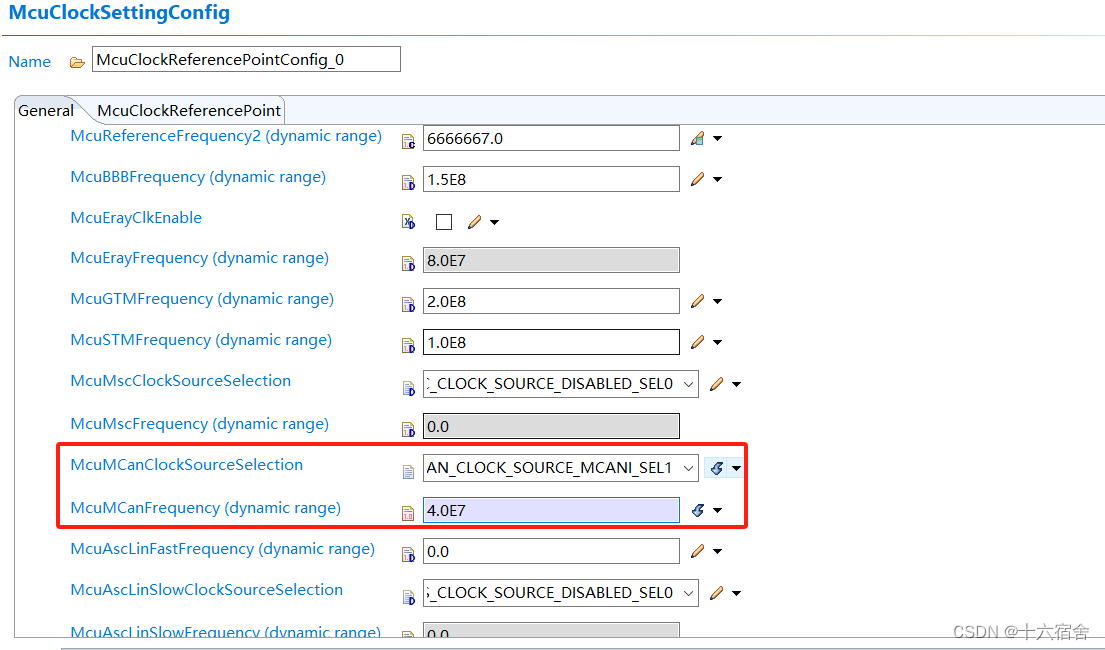
配置CAN时钟源频率,需要注意的配置如下。
- mcumcanclocksourcesselection:用于选择不同的时钟源,MCAN_CLOCK_SOURCE_MCANI_SEL1时钟源为fMCANI,MCAN_CLOCK_SOURCE_OSC_SEL2时钟源为Main oscillator。
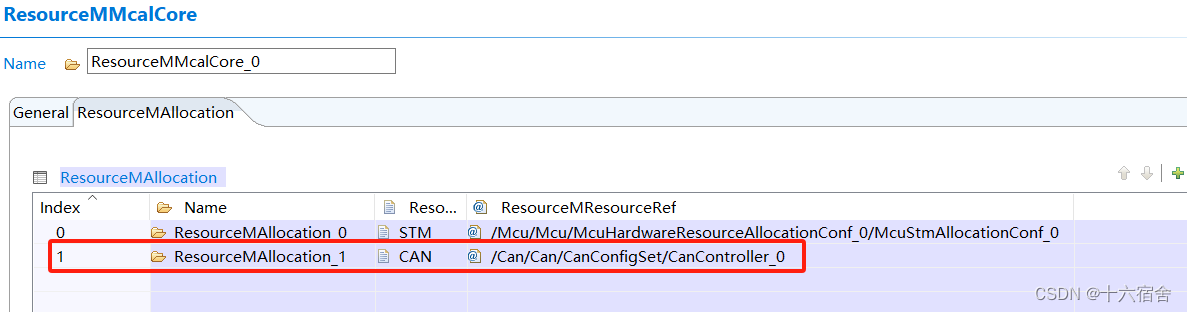
ResourceM配置
配置使用资源,分配核,在Core0中添加CAN,并关联CanController_0。
CAN驱动调试
标准CAN测试代码与结果
测试代码如下,主要包含一个初始化的过程和以50ms为周期发送报文。
uint8 Buffer_TX0[8];
uint8 Buffer_RX0[8] ;
Can_PduType TestPduInfo[ ] =
{
{0,8, 0x100, Buffer_RX0 },
{0,8, 0x510, Buffer_TX0 },
};
Can_ReturnType Can_Return = CAN_OK;
void Can_DemoFunction(void)
{
IrqCan_Init();
SRC_CAN_CAN0_INT0.B.SRE = 1;
SRC_CAN_CAN0_INT1.B.SRE = 1;
SRC_CAN_CAN0_INT2.B.SRE = 1;
SRC_CAN_CAN0_INT3.B.SRE = 1;
Can_17_McmCan_Init(&Can_17_McmCan_Config);
Can_17_McmCan_SetControllerMode(Can_17_McmCanConf_CanController_CanController_0, CAN_T_START);
Can_17_McmCan_EnableControllerInterrupts(Can_17_McmCanConf_CanController_CanController_0);
uint8 i;
/*-----------------test the can ---------------------*/
for(i = 0; i < 8; i++)
{
Buffer_TX0[i]= i;
}
TestPduInfo[1].id = 0x666;
while(1)
{
Can_Return = Can_17_McmCan_Write(Can_17_McmCanConf_CanHardwareObject_CanHardwareObject_StandTx, &TestPduInfo[1]);
Delay(50);
}
}
CAN帧ID为0x666的报文被以50ms正常发送。

接收结果测试则发送CANID为0x100,Data为0x11 0x22 0x33 0x00的CAN报文,通过调试器仿真在CanIf接收回调里打断点来查看是否接收成功如下图。

CANFD测试代码与结果
代码如下,与标准帧不同的地方在于数据为64字节,而CANID是或上了0x40000000,例如本例子的0x123就要设置为0x40000123,从而控制发送CANFD帧。
uint8 tx_data_Fd[64] =
{ 0x39, 0x22, 0x33, 0x44, 0x55, 0x66, 0x77, 0x88, 0x99, 0x11, 0x22, 0x33,
0x44, 0x55, 0x66, 0x77, 0x88, 0x99, 0x01, 0x02, 0x15, 0x16, 0x17, 0x18, 0x91,
0x92, 0x93, 0x94, 0x95, 0x96, 0x97, 0x98
};
/* CAN Frame PDU Info for FD */
Can_PduType PduInfo_FD[] =
{
{2, 32, 0x40000123, tx_data_Fd },
{2, 32, 0x40000111, tx_data_Fd },
};
Can_ReturnType Can_Return = CAN_OK;
void Can_DemoFunction(void)
{
IrqCan_Init();
SRC_CAN_CAN0_INT0.B.SRE = 1;
SRC_CAN_CAN0_INT1.B.SRE = 1;
SRC_CAN_CAN0_INT2.B.SRE = 1;
SRC_CAN_CAN0_INT3.B.SRE = 1;
Can_17_McmCan_Init(&Can_17_McmCan_Config);
Can_17_McmCan_SetControllerMode(Can_17_McmCanConf_CanController_CanController_0, CAN_T_START);
Can_17_McmCan_EnableControllerInterrupts(Can_17_McmCanConf_CanController_CanController_0);
while(1)
{
Can_Return = Can_17_McmCan_Write(Can_17_McmCanConf_CanHardwareObject_CanHardwareObject_CANFD, &PduInfo_FD[0]);
Delay(50);
}
}测试需要的CANoe设置500k为控制器波特率,5000k为数据域波特率。

测试结果如下图

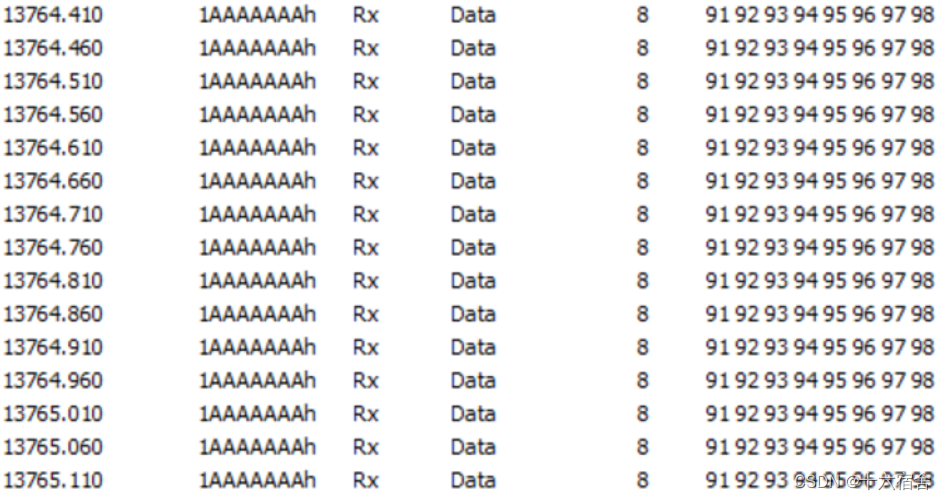
扩展帧测试代码与结果
代码如下,注意ID是或上了一个0x80000000,表明发送的为扩展帧。
uint8 tx_data_1[8] = {0x91, 0x92, 0x93, 0x94, 0x95, 0x96, 0x97, 0x98 };
Can_PduType PduInfo_ExtId[] =
{
{0, 8, 0x9AAAAAAA, tx_data_1},
{0, 8, 0x81111111, tx_data_1}
};
Can_ReturnType Can_Return = CAN_OK;
void Can_DemoFunction(void)
{
IrqCan_Init();
SRC_CAN_CAN0_INT0.B.SRE = 1;
SRC_CAN_CAN0_INT1.B.SRE = 1;
SRC_CAN_CAN0_INT2.B.SRE = 1;
SRC_CAN_CAN0_INT3.B.SRE = 1;
Can_17_McmCan_Init(&Can_17_McmCan_Config);
Can_17_McmCan_SetControllerMode(Can_17_McmCanConf_CanController_CanController_0, CAN_T_START);
Can_17_McmCan_EnableControllerInterrupts(Can_17_McmCanConf_CanController_CanController_0);
while(1)
{
Can_Return = Can_17_McmCan_Write(Can_17_McmCanConf_CanHardwareObject_CanHardwareObject_Extern, &PduInfo_ExtId[0]);
Delay(50);
}
}
测试结果如下。
十六宿舍 原创作品,转载必须标注原文链接。
©2023 Yang Li. All rights reserved.
欢迎关注 『十六宿舍』,大家喜欢的话,给个👍,更多关于嵌入式相关技术的内容持续更新中。